華為激光雷達(dá)技術(shù)深度解析 從硬件拆解到智能駕駛系統(tǒng)方案
隨著智能駕駛技術(shù)步入深水區(qū),激光雷達(dá)作為實(shí)現(xiàn)高階自動(dòng)駕駛的核心傳感器之一,其技術(shù)演進(jìn)與系統(tǒng)整合能力成為行業(yè)競(jìng)爭(zhēng)的關(guān)鍵。華為憑借其在通信與ICT領(lǐng)域的深厚積累,推出了自研的車(chē)規(guī)級(jí)激光雷達(dá)及其配套系統(tǒng)方案,為業(yè)界提供了頗具競(jìng)爭(zhēng)力的技術(shù)路徑。本文將從硬件拆解與系統(tǒng)方案兩個(gè)維度,結(jié)合網(wǎng)絡(luò)信息技術(shù),對(duì)華為激光雷達(dá)進(jìn)行深度剖析。
一、 硬件深度拆解:精密設(shè)計(jì)與車(chē)規(guī)級(jí)可靠性
華為激光雷達(dá)(以96線中長(zhǎng)距產(chǎn)品為例)采用了獨(dú)特的微轉(zhuǎn)鏡掃描架構(gòu),其內(nèi)部結(jié)構(gòu)精密且高度集成。
- 發(fā)射模塊:核心是華為自研的VCSEL(垂直腔面發(fā)射激光器)陣列。與傳統(tǒng)的邊發(fā)射激光器(EEL)相比,VCSEL具有閾值電流低、壽命長(zhǎng)、易于二維集成等優(yōu)勢(shì)。多個(gè)激光器以陣列形式排布,通過(guò)精確的光學(xué)整形和準(zhǔn)直,形成穩(wěn)定、均勻的激光光束,為后續(xù)掃描提供高質(zhì)量光源。
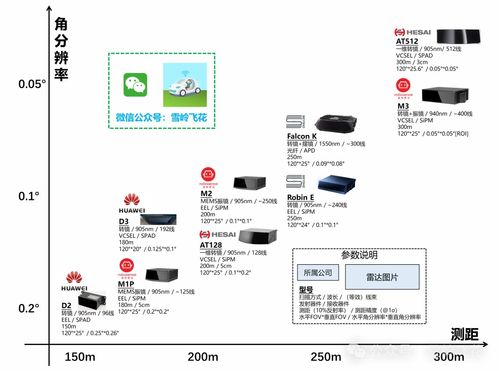
- 掃描模塊:這是華為方案的技術(shù)亮點(diǎn)。它摒棄了復(fù)雜的多線機(jī)械旋轉(zhuǎn)結(jié)構(gòu),采用一維高速振鏡配合多線VCSEL陣列進(jìn)行二維掃描。微轉(zhuǎn)鏡由高精度MEMS(微機(jī)電系統(tǒng))技術(shù)驅(qū)動(dòng),體積小巧,可靠性極高,是實(shí)現(xiàn)車(chē)規(guī)級(jí)耐久性(如華為宣稱(chēng)的2.5億次電機(jī)測(cè)試壽命)和低成本的關(guān)鍵。其掃描模式可靈活編程,既能實(shí)現(xiàn)前方120°x25°的廣角視場(chǎng)覆蓋,也能對(duì)重點(diǎn)區(qū)域進(jìn)行高密度點(diǎn)云掃描。
- 接收模塊:主要包含光學(xué)接收系統(tǒng)和SPAD(單光子雪崩二極管)探測(cè)器陣列。反射回來(lái)的微弱激光信號(hào)經(jīng)過(guò)接收光學(xué)系統(tǒng)匯聚后,打在SPAD陣列上。SPAD具有極高的靈敏度,能夠探測(cè)到單個(gè)光子級(jí)別的信號(hào),極大提升了雷達(dá)的探測(cè)距離(華為宣稱(chēng)可達(dá)150米@10%反射率)和弱光環(huán)境下的性能。接收到的光信號(hào)在此轉(zhuǎn)換為電信號(hào)。
- 信號(hào)處理與控制模塊:這是激光雷達(dá)的“大腦”。集成了高性能的專(zhuān)用集成電路(ASIC),負(fù)責(zé)驅(qū)動(dòng)激光發(fā)射、控制掃描鏡運(yùn)動(dòng)、對(duì)SPAD輸出的原始電信號(hào)進(jìn)行高速采集、放大、甄別和數(shù)字化。該模塊還實(shí)現(xiàn)了復(fù)雜的信號(hào)處理算法,如背景光抑制、噪聲過(guò)濾、飛行時(shí)間(ToF)計(jì)算等,最終實(shí)時(shí)輸出精準(zhǔn)的三維點(diǎn)云數(shù)據(jù)。所有模塊被高度集成在一個(gè)結(jié)構(gòu)緊湊、具備IP67以上防護(hù)等級(jí)的外殼內(nèi),確保能應(yīng)對(duì)車(chē)載環(huán)境的振動(dòng)、溫濕度變化及電磁干擾。
二、 系統(tǒng)方案:基于網(wǎng)絡(luò)信息技術(shù)的“感知-決策”融合
華為并非僅僅提供激光雷達(dá)硬件,而是構(gòu)建了一套以激光雷達(dá)為核心,深度融合網(wǎng)絡(luò)信息技術(shù)的智能駕駛感知系統(tǒng)方案。
- 多傳感器深度融合:華為的ADS(自動(dòng)駕駛系統(tǒng))方案強(qiáng)調(diào)激光雷達(dá)、毫米波雷達(dá)、攝像頭等異構(gòu)傳感器的深度融合,而非簡(jiǎn)單疊加。通過(guò)自研的融合感知算法,在數(shù)據(jù)層或特征層將激光雷達(dá)提供的精確三維幾何信息、毫米波雷達(dá)的穩(wěn)定測(cè)速信息以及攝像頭豐富的紋理語(yǔ)義信息進(jìn)行互補(bǔ)與校驗(yàn),形成穩(wěn)定、可靠、全天候的周?chē)h(huán)境感知結(jié)果。這背后需要強(qiáng)大的實(shí)時(shí)計(jì)算能力和高效的算法架構(gòu)支撐。
- “車(chē)-云”協(xié)同的數(shù)據(jù)閉環(huán):華為利用其全球領(lǐng)先的ICT技術(shù),構(gòu)建了強(qiáng)大的數(shù)據(jù)閉環(huán)體系。部署在量產(chǎn)車(chē)輛上的激光雷達(dá)等傳感器持續(xù)收集真實(shí)的駕駛場(chǎng)景數(shù)據(jù)(經(jīng)脫敏處理)。這些數(shù)據(jù)通過(guò)高速移動(dòng)網(wǎng)絡(luò)(如5G)上傳至云端。在云端,利用龐大的算力集群和AI訓(xùn)練平臺(tái),對(duì)這些海量數(shù)據(jù)進(jìn)行自動(dòng)化標(biāo)注、場(chǎng)景挖掘、模型訓(xùn)練和算法迭代優(yōu)化。更新后的算法模型再通過(guò)OTA(空中下載技術(shù))遠(yuǎn)程部署到車(chē)隊(duì)中,使得整個(gè)系統(tǒng)的感知能力能夠持續(xù)進(jìn)化,應(yīng)對(duì)長(zhǎng)尾場(chǎng)景。這種基于云和大數(shù)據(jù)的迭代模式,是網(wǎng)絡(luò)信息技術(shù)在智能駕駛領(lǐng)域最核心的應(yīng)用之一。
- 高精地圖與實(shí)時(shí)定位:激光雷達(dá)點(diǎn)云與事先采集的高精地圖進(jìn)行匹配,是實(shí)現(xiàn)車(chē)輛厘米級(jí)定位的重要手段。華為在地圖領(lǐng)域亦有布局,其激光雷達(dá)能夠?yàn)楦呔貓D的采集與更新提供數(shù)據(jù),同時(shí)也能在無(wú)高精地圖區(qū)域依靠自身感知實(shí)現(xiàn)定位與導(dǎo)航。
- 計(jì)算平臺(tái)與通信架構(gòu):華為自研的MDC(移動(dòng)數(shù)據(jù)中心)智能駕駛計(jì)算平臺(tái),為多激光雷達(dá)及其他傳感器的海量數(shù)據(jù)并行處理提供了強(qiáng)大的算力底座。其內(nèi)部的高速互聯(lián)總線確保數(shù)據(jù)低延遲流通。車(chē)載網(wǎng)絡(luò)通信技術(shù)(如CAN FD、以太網(wǎng)等)的優(yōu)化,保障了傳感器、計(jì)算單元和執(zhí)行器之間指令的實(shí)時(shí)、可靠傳輸。
華為激光雷達(dá)的成功,不僅在于其通過(guò)精巧的固態(tài)掃描設(shè)計(jì)和核心元器件自研實(shí)現(xiàn)了高性能與高可靠性的平衡,更在于其將激光雷達(dá)置于一個(gè)更大的、基于先進(jìn)網(wǎng)絡(luò)信息技術(shù)的智能駕駛系統(tǒng)框架內(nèi)。從邊緣的車(chē)端高性能感知與計(jì)算,到云端的數(shù)據(jù)驅(qū)動(dòng)持續(xù)學(xué)習(xí),華為構(gòu)建了一個(gè)端云協(xié)同、軟硬一體、持續(xù)進(jìn)化的智能駕駛解決方案,這或許是其挑戰(zhàn)現(xiàn)有汽車(chē)供應(yīng)鏈格局、賦能汽車(chē)產(chǎn)業(yè)智能化的核心優(yōu)勢(shì)所在。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://m.zdjyxt.cn/product/65.html
更新時(shí)間:2026-05-22 07:21:36